
主な応用例
下水道管ロボット
車の運転手が都会の真ん中の慌ただしい交差点で信号待ちをしているのは、ごく普通の朝の風景です。まさか自分が工事現場の中・・・正確には工事現場の真上にいるという実感などないでしょう。わずか数メートル下では、眩いひと筋の光が暗闇を切り裂き、地下の「住人たち」を驚かせているのです。カメラレンズが撮影する、濡れてひび割れた地下内壁の画像は、地上でモニタに集中しながらロボットを操作するオペレータに転送されます。これはSFやホラー映画のワンシーンではなく、現代社会における下水道補修現場の日常なのです。FAULHABER製モータは、カメラ制御、各種ツール機能、車輪駆動に利用されています

深海ロボット
地獄の底が天上界に与える影響は?これは神学の問いではありません。海洋学者は水深が最も深い海域を超深海層(Hadal Zone)と呼んでいますが、これは、古代ギリシャの影の帝国にちなんで名づけられたものです。しかし、海洋学者は冥王ハーデスの神話でも語られていない、かなり多くの生物が存在しているのではないかと考えています。海底深くの海溝が、世界の気候に影響を及ぼしているかもしれないのです。その答えの探求に、FAULHABERのモータが貢献しています。

ジッパーマスト
ボビーカー型の遠隔操作されたキャタピラ車両が頭の高さの壁のすぐ前で停止します。すると、先端に小型カメラが搭載されたマストが車体の内部から伸びてきます。その直後、何にも妨げられず、壁の向こうの様子をとらえます。独バイエルンのprogenoXは無人探索用の車両を提供しています。目玉となるのは、極めてコンパクトな「Zippermast」です。この製品はジッパー原理による3本の連動するスチールテープから成っています。FAULHABER製のモータは信頼性の高い格納と拡張性を備えたユニークなデザインを提供しています。

小型部品用グリッパー
SCHUNK製の新しい小型部品用グリッパーは圧縮空気なしで機能します。今まで、高速でパワフルな小型グリップシステムの多くは、空気圧式によってのみ実現可能でした。圧縮空気を使用すれば、ほぼ遅延なく大きな圧力を伝えることができます。しかし、圧縮空気の供給には複雑なインフラが必要であり、それを全ての製造工程に供給することは困難で、費用もかかります。有り難いことに、SCHUNK製のメカトロニクスに対応したEGP40によって、このインフラが不要になりました。ワーク保持技術とグリッパーシステムの第一人者によるこの新型グリッパーは、空気圧式グリッパーとほぼ同じ性能を実現しています。それを可能にしている駆動装置がFAULHABER製のブラシレスDCサーボモータです。

産業用ロボット
他の惑星の探索や、自動車部品の製造、ホコリやゴミの掃除と、今ではいたる所でロボットが活躍しています。しかし、それらロボットの外見は、通常SFファンが想像している形とはだいぶ異なります。平らな台車のように動き回ったり、工場内に大型機械として固定されています。目と耳、そして手足を備えるヒューマノイドロボット(人型ロボット)は、依然として、開発の初期段階にあります。この分野に取り組んでいる韓国企業Dongbu Robotが、ヒューマノイドロボットの「核となる駆動力」として利用しているのが、FAULHABER製のモータです。

CHIMPロボット
ロボットの駆動に最適なFAULHABER社製モータの高い精度と効率性。
それが、成長を続けるロボット産業において当社がモータの主要サプライヤと位置付けられている理由です。

無人地上車両
小型無人地上車は、コンパクトで高トルクサーボモータの助けにより厳しい環境で確実に偵察を実行します。

MROV(小型の遠隔操作車両)
爆弾、IED、偽装爆弾、その他、過激派組織の倉庫にある危険な武器。これらを迅速に見つけ出し解除することは、当然ながら専門家に任せるべき仕事です。不必要に専門家を呼び出さずに済み、発見された脅威の安全な処理を担保するために不可欠な手順、それが事前偵察です。その際、専用の遠隔操作デバイスを利用することで、そのような危険な活動に携わる人間へのリスクを大幅に低減できます。ここでは、爆弾の近くでの手動による危険な作業を、高精度マイクロモータが行います。
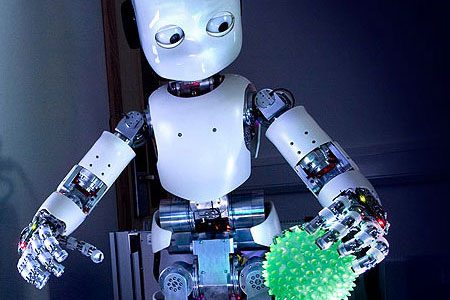
人型サービスロボット
はるか昔から、人々は人造人間の開発を夢見てきました。今日、最新技術によりヒューマノイドロボットというかたちで、この夢が現実のものとなりました。依然として膨大な開発作業が必要とされてはいますが、すべてのプロジェクトが第一歩を踏み出す時期にきています。プロセスの初期段階として、自律的に動作する人型サービスロボットは、既に幅広い成果を上げています。使用される多数のコンポーネント間の相互作用に加え、電源供給と部品の搭載スペースが主な課題となっています。マイクロドライブは、これら2つの課題を解消する理想的なソリューションです。その高電力密度と高効率性、さらには最小限の設置スペースにより、重量出力比が向上し、バッテリーを再充電せずに、ロボットを長時間駆動できます。
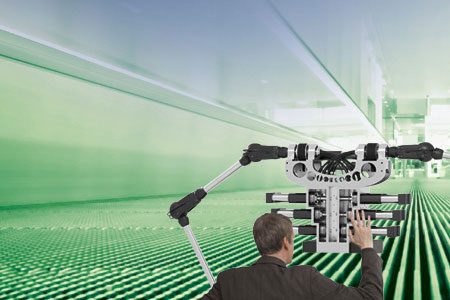
ロボットアーム
自由に動くアームは、ロボット用としてだけでなく、3次元空間内での操作ツールとして既に実用化されたソリューションです。しかし、今までほとんどのソリューションが、回転軸の駆動力とアームの安定性との間に生じる、負の相互作用の抑制に悩まされてきました。可動部を軽量化することで、アームの慣性力が低減します。ジブアームの軽量化で、よりダイナミックな作業が可能となる一方で、安定性はそのまま維持されます。
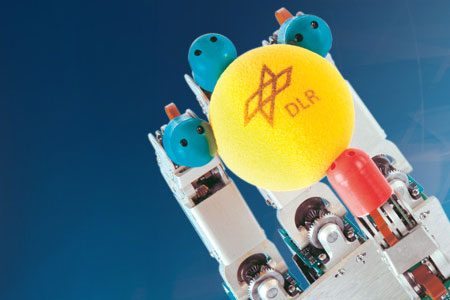
ロボットハンド
これまで、工業生産に使われるロボットハンドは武骨な二本指または三本指のグリッパーに限られていました。このようなグリッパーは比較的単純な動作向けに使われています。より繊細な作業のためのロボットハンドは、技術力不足で実用化できませんでした。今日、マイクロエレクトロニクスとマイクロメカニクスの相互作用がプラスに働いて技術が飛躍的進歩を遂げました。確かに、この分野における技術進歩によって生じるメリットは絶えず拡大しつつあります。したがって人間の手のように個別に制御できる指と関節を持つロボットハンドはもはやフィクションではなく、産業分野ではおそらく近いうちに日常的に利用できるようになるでしょう。

ロボットカー
今日、移動ロボットは、人が対処することが危険すぎる危機的な状況において、不審物の特定や爆弾の無力化処理など、工業用操作や法の執行、またはテロ対策の一部として、しばしば展開されます。極限状況のため、このような「マニピュレータ・ビークル」は特殊な要件に適合する必要があります。ツールの正確な操縦と高精度のハンドリングが基本的な2つの必須要件です。もちろん、狭い通路を通ることができるように、デバイスもできる限り小型にする必要があります。当然、そのようなロボットに使われるデバイスは等しく優れたものでなければなりません。専用の高性能マイクロモータは必須のコンポーネントになっています。

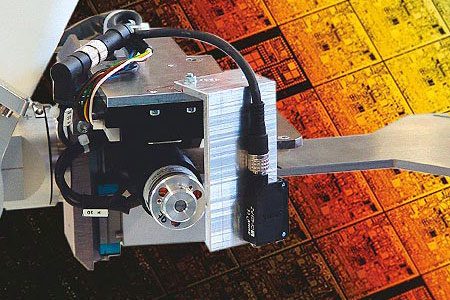
表面実装機チップマウンター
今⽇では、⼤量⽣産の電⼦機器のほぼ全てが⾼性能の表⾯実装機により製造されています。こうしたライフサイクルの短い製品においては、⽂字どおり時は⾦なりなので、使われる製品設備には、⽣産数を最⼤にすることと、切り替え時間を最⼩にとどめることが重要です。メーカーにとってこのことは、連続運転におけるシンプルな処理と同時に最⾼の⽣産⾼を保証することを意味します。この要件は、複雑な機械的プロセスが常に正確かつ再現可能であることによってのみ満たされます。そこで不可⽋となる部品が、最⼩⾯積で優れた機能を発揮するマイクロモータです。
産業用ロボット
ハイエンドの半導体製造で使用される高価なシリコンウェハの取り扱いは、非常に複雑な作業です。そのため、シリコンウェハの製作行程の大部分は、自動化されています。エッチングとは、最先端の半導体製造における手順のひとつです。ここでは、先の行程に進む前に、シリコンウェハを専用の加工装置にセットして固定します。モーションコントローラが統合された、電子整流式のマイクロモータは、安全かつ保守不要の三交代勤務の連続運転を可能にします。

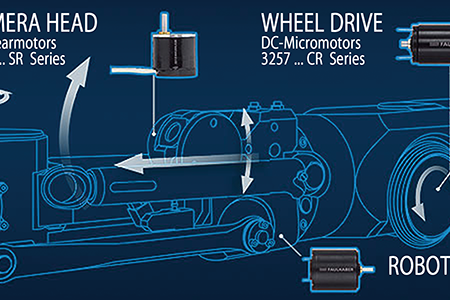
下水道管ロボット
何千マイルにも及ぶ地下パイプは重要な役割を担っています。これらのパイプを確実に運用する必要があります。内部の検査とメンテナンスは、これまではパイプ径が大きい場所のみで可能でした。比較的小口径の下水道管には人が入れるだけの十分な空間がなく、損傷した場合も破損箇所を掘り起こして露出させることが唯一の解決策でした。経費のかかる仕事です。しかし、電子機器や運動制御工学の分野における新たな発展により、小口径の下水道管を内部から検査し、メンテナンスを行うこがを可能になっています。下水道部門においてはすべてのツールに極めて高い水準の信頼性と性能が求められるため、そうした下水道管ロボットに装着されるデバイスは極めて堅牢でなくてはなりません。今日のベルタイプの電機子DCモータはパイプシステムの内部で使用するための厳格な要件厳しい要求を満たしています。

シュリンプ(SHRIMP)
今日のコンピュータとセンサ技術は、高速で信頼性の高いデータ収集を完璧に行います。噴火口、溶鉱炉、原子力発電所の構内作業など、人が入ることができない環境でさえももはや問題ではありません。残念ながら、この技術には常にある不利な点が付きまとっています。モビリティの欠如、つまり移動できないということです。今日まで、計測機器を携行するためのあらゆる状況に対応可能な車両というコンセプトがなかったために、未知の領域の調査が阻まれていました。人が近づけない場所には、操縦が非常に容易で厳しい地形に対応できる車両が欠かせませんでした。たとえば、炭鉱事故、人が入れない建築現場での調査、地雷探知、あるいはこのような要求の全てをはるかに超える地球外の惑星探査などがあります。これらすべての用途には高いレベルの信頼性、多重性そして自律性が求められます。これらはすべて新型車両「シュリンプ(Shrimp)」のコンセプトの特徴となっています。

ベルトコンベア
製品の小型化は、急速に進んでいます。このため、組み立て装置にも、かつてないほど小さい部品が使われるようになっています。そして、標準サイズの部品を使った通常のベルトコンベアで、これまでより多くの荷物を安全に運べるようになりました。小さい物を運ぶために最適化するには、その要件に合った適切な製品を選ぶことになります。丈夫な材料、そして耐久性のある保守不要の部品を使うことで、長期にわたって高い操作性を保証できます。
電動空気圧式の旋回ユニット
産業用のマテリアルハンドリングや自動化タスクにおいて、加工材料やツールを所定の位置へと回転させなくてはならないことが頻繁に起こります。そこで大きな需要が生まれているのが旋回ユニットです。高速かつ正確な駆動から、ハイパワー駆動、保守の容易さなど、求められる要件は多岐にわたります。実際には、パワフルな空気圧式ドライブでは、決められた位置に正確に到達するのが困難であったり、コンパクトな電動ドライブでは、作業に求められる十分なパワー出力を発揮できないなど、これら様々な要件を満たすのは容易ではありません。旋回ユニットの新しい標準として、両ドライブの新たなコンセプトの組み合わせが、いま求められています。