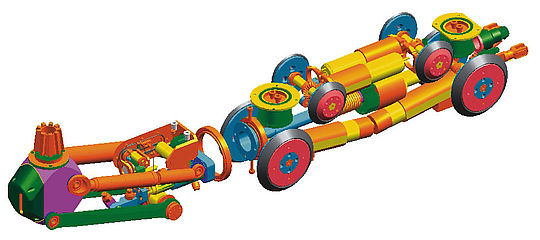
地方自治体や企業によって運営されている大規模で広範囲に及ぶ下水道管の多くは老朽化が進んでおり、定期的なメンテナンスが必要です。修理が必要となる軽度から重度の損傷は増える一方です。パイプシステムに関するそのような作業のために、下水道管ロボットのスペシャリストであるPROKASROは、幅広いツールと装置を開発しました。発電機、コンプレッサ、水タンク、および電子制御などの補助装置を搭載した自律サービス車両(図1)からケーブル遠隔制御とモニタを用いてロボットを操縦します。
トレイリングケーブル
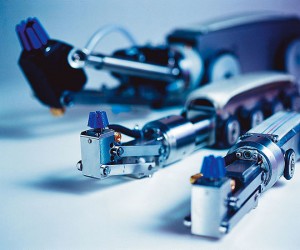
下水道管ロボットには、サービスのタイプに応じた様々なサイズ、ツール、およびその他の固有の機能が備わっています(図2)。共通しているのは、サプライケーブルを通じた供給と制御です。このケーブルは32本の電線、4本の圧縮空気ホース、および4本の水ホースから成り、ロボットは、この39mmの太さの「へその緒ケーブル」を引きずりながら下水道管を進んでいきます。ケーブルの標準的な長さは120mですが、最大200mまで伸ばすことができます。これだけの長さと下水道管に常にたまる物汚泥の量を考えると、作業をスムーズに行うにはパワフルな駆動が必要不可欠です。
FAULHABER製のコアレスロータを組み込んだ小型DCモータを使用することで、この問題は解決されました。
たとえば、あるバージョンのロボットには地下での柔軟な作業ができるようにこのタイプのモータが9台搭載されています。

下水道管ロボットには、サービスのタイプに応じた様々なサイズ、ツール、およびその他の固有の機能が備わっています(図2)。共通しているのは、サプライケーブルを通じた供給と制御です。このケーブルは32本の電線、4本の圧縮空気ホース、および4本の水ホースから成り、ロボットは、この39mmの太さの「へその緒ケーブル」を引きずりながら下水道管を進んでいきます。ケーブルの標準的な長さは120mですが、最大200mまで伸ばすことができます。これだけの長さと下水道管に常にたまる物汚泥の量を考えると、作業をスムーズに行うにはパワフルな駆動が必要不可欠です。
FAULHABER製のコアレスロータを組み込んだ小型DCモータを使用することで、この問題は解決されました。
たとえば、あるバージョンのロボットには地下での柔軟な作業ができるようにこのタイプのモータが9台搭載されています。使われている駆動部は4つの軸で構成されており、それぞれの軸は1台の3357…CRシリーズのモータから成っています。モータは、速度と牽引力の最適な調整を保証できるようにギアヘッドと組み合わせて使用されています。
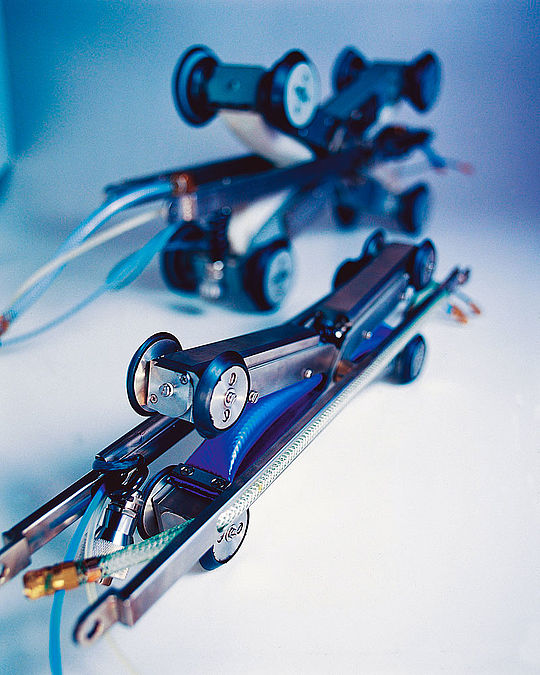
このソリューションの優位点は、同じロボットが大きな車輪で大口径のパイプ内で稼働できることと、減速ギアが車輪サイズに比例して回転スピードを適切に落とすことです。このように速度と牽引力は車輪の直径に依存せずに維持されて、サービス車両にいるオペレータはいつもと同じように作業することができます。安定姿勢は、上部の対になった車輪をパイプ内壁に押し付ける空気圧シリンダーによって確保されます。クラックやへこみなどのパイプ内の軽微な損傷があってもゴムタイヤの車輪で容易に乗り切ります。小口径の車輪にもかかわらず、4台の駆動モータの総牽引力は約1,000N(つまり、100kg)です。

可動ヘッド
パイプ内部の各部で検査と作業を行うために、ロボットの前部には旋回カメラと空気動力のミリングマシンを搭載しています。ここでも動作の駆動源は小型DCモータです。車輪駆動部の間に取り付けられているもう1つのモータによってロボットヘッドがその縦軸を中心にして回転することができます。
ヘッド本体の内部には、ミリングマシンの角度可変デバイス内にDCモータが組み込まれています(図)。
2台の小型モータによってカメラを上下左右に向きを変え、焦点調節機構をコントロールすることができます(図)。
ここでのFAULHABERデバイスの主な優位点は、その電力密度の高さであり、それによってロボットを非常に小さくして直径200mm以上のパイプから展開が可能となるのです。ただし、このロボットは直径が最大600mmのパイプにも適用可能です。
42V未満の電圧供給による低電圧モータであるため、水中作業の要件を満たしています。高レベルの効率は封入筐体の内部の廃熱を維持します。この廃熱は圧縮空気の正圧によって妥当な範囲内に維持されます。制御コマンドに対する直接的な反応も欠かすことはできません。モニタ画像上の動作とロボットの動作が仮想的に同期し、モータの追従による遅れを最小限にする必要があります。
それが、ごく短時間の研修を受けるだけでオペレータがパイプ内でロボットを確実に動かすことができる唯一の方法です。
今日、最新のカメラ電子機器と駆動コンポーネントを装備した下水道管ロボットは、地下の下水道管ネットワークに対する検査、メンテナンス、修理のコストを減少させています。最適に構成された極めて小さな駆動ソリューションは、細いパイプ内でさえも自在に動き回れる主要コンポーネントです。小型DCモータの信頼性とその効率の高さにより、非常にコンパクトな設計となっています。