
デメリットを抱えた義肢。
パラリンピックなどの障害者スポーツ大会を観戦すると、義肢が今日達成している動作レベルに目を見張ります。例えば、2014年夏、ドイツの走り幅跳び選手マルクス・レーム氏は、欧州陸上競技選手権大会への参加を認められませんでした。ドイツ陸上競技連盟が、カーボン製の義足で跳躍すると、健常者の選手よりも優位に立つのではと恐れたためです。とはいえ、カーボンやその他の素材で作られた高度な義肢は、装着者が真の意味では失われた体の部位と同じように扱えないという決定的なデメリットを抱えています。市場に出回る義手は、切断後も残っている四肢の筋肉の動きを検知し、装着者が手を開閉したり、物を掴んだりすることを可能にしますが、神経系への感覚フィードバックがないと、装着者は何を掴もうとしているのかを感じられないため、物をつぶさないよう義手に目を光らせていなくてはなりません。
生来の手と同じように。
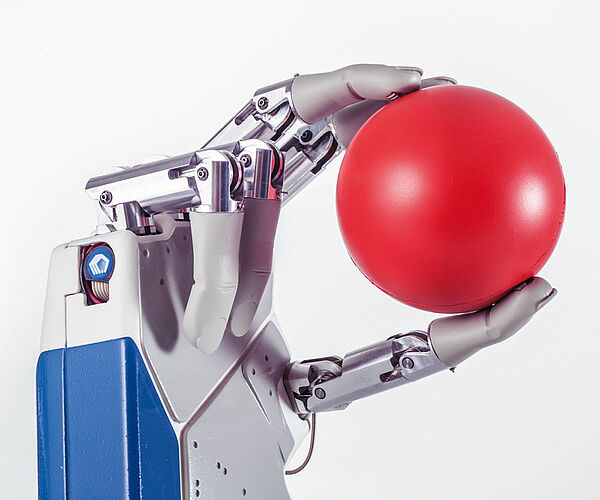
「LifeHand 2」プロジェクトで、大きな進展を遂げました。この義手は、適度な握力で物を掴み、接触センサを介して物の特徴を感じ取れるという、装着者にとっては画期的といえるものです。装着者は、どの指が物に触れているかまで正確に感じ取ることができます。サイズと重量は、生来の手と同じくらいです。
「LifeHand 2」は、人工腱の張力を測定し、指の動きを制御することで触覚を記録するセンサを搭載しています。
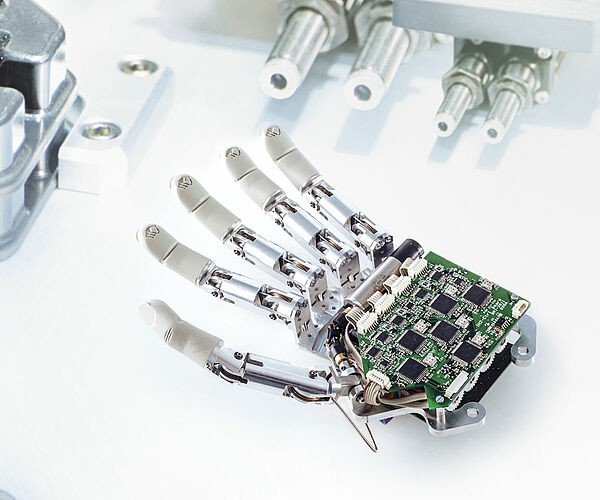
こうしたデータは電気信号へと変換され、神経に伝達されますが、神経線維に接続されている電極を介してこれを行っています。この電極が信号を装着者の脳に伝達します。コンピュータがセンサからの信号を、神経が解釈できるパルスに変換します。パルスに変換された信号は、電極を介して正中神経と尺骨神経へとさらに伝達されます。スイス連邦工科大学ローザンヌ校(EPEL)において、国際的な研究チームがバイオニックハンド(筋電義手)を開発しました。イタリア、スイス、ドイツにある6つの研究機関が参画し、イタリアのサンターナ大学院大学(SSSA)のシルヴェストロ・ミルセラ(Silvestro Micera)教授率いるチームが、感覚フィードバック装置を開発しました。この装置のおかけで、患者は、物に触れたり動かしたりするときの感覚を取り戻すことができるようになりました。
2013年2月、イタリアのローマにあるジェメリー大学病院において、パオロ・マリア・ロッシーニ(Paolo Maria Rossini)の監督の下、「LifeHand 2」の試作品のテストを治験の範囲内で行いました。デンマーク人のデニス・アーボ・ソーレンセン氏(Dane Dennis Aabo Sørensen)が「LifeHand 2」の最初の被験者に志願しました。9年前、彼は事故で左手を失いました。4つの極微インターフェースが、彼の左腕の主な神経に移植されました。手術で電極を埋め込んだ後、傷が治ると、義手を接続できるようになりました。ソーレンセン氏が物に触れると、義手のセンサが電気信号を生成し、コンピュータによって処理され、シミュレータを介して神経に埋め込まれた電極に中継され、最終的に彼の脳に伝達されました。このすべてが100ミリ秒以内で行われました。こうした最小時間間隔であれば、人は伝達遅延を感知しません。ソーレンセン氏は、物の形・柔らかさ・位置をリアルタイムで認識し、この情報を利用して適度な力で物を握ったり掴んだりすることができました。研究チームは、ソーレンセン氏が義手をたちまちのうちに制御できるようになったことに驚きました。テストとして、ソーレンセン氏に目隠しをして、「LifeHand 2」で物を拾い上げてもらったところ、握力を制御できるだけでなく、見えない状態でも物の形や手触りを説明できました。
FAULHABERの高度なモータ。
「LifeHand 2」の親指と4本指の実用化をもたらした、細部まで緻密で精巧な職人技が、FAULHABERのDCマイクロモータに込められています。直径13ミリ、長さ31ミリのこのモータは、軽量で小型です。FAULHABERのDCモータのユニークな特徴はローターです。鉄芯にコアを巻くのではなく、自立式スキュー回転設計で製造された銅コイルで構成されています。FAULHABERのローターは、超低慣性トルクとコギングのない実行特性により、「LifeHand 2」プロジェクトにおいてその実力を納得のいく形で実証しました。