
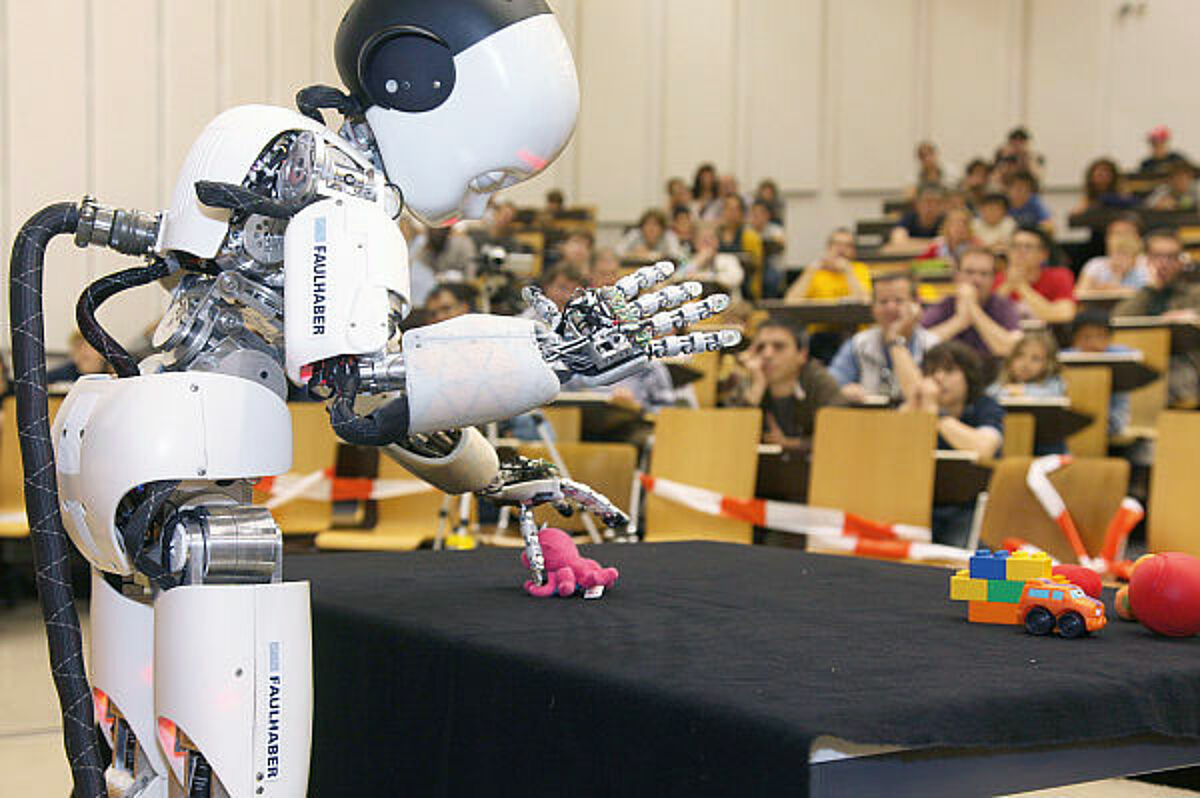
より人間に近いロボットであるほど、より複雑なメカトロニクスエンジニアリングに基づく情報入力が求められます。たとえば、美術館、空港、病院といった場所でのサービスや情報提供など、特にロボットの「対人コミュニケーション」が必要とされる分野では、ロボット構築の高度な技術が不可欠です。バルセロナを拠点とするPal Robotics S.L.社では、長年にわたり、特別な用途で使われるヒューマノイドの開発に取り組んできました。たとえば、ボディランゲージなどの非言語コミュニケーションは、ヒューマノイドを受け入れてもらいやすくする上で重要な役割を果たしています。事前設定されたロボット本体に、可能な限り多くの機能を搭載するため、このロボティクスチームは、ドイツのシェーナイヒを拠点とするマイクロドライブのスペシャリストFAULHABERとの共同開発に取り組んでいます。人間がもつ特徴を明確に示し、特定の意思をボディランゲージによって強調できるようなロボットモデルの開発へとつながりました。
サービスロボットの実用化に向けて
日常的な業務を遂行するためのヒューマノイドロボットは、一定の条件を満たしていなくてはなりません。開発チームは、新型REEMロボットに対する、情報アウトプット、簡単な搬送作業、サービス業務などの機能統合を目指していました。
これを受け、人間と近い目の高さでコミュニケーションを図れる、身長165cmのロボットが開発されました。また、必要なバッテリーを内蔵するため、ロボットの重心を低い位置に設定する必要がありましたが、基本的に重くなり過ぎないことも重要でした。現行モデルは重量90kg前後で、8時間の自律運転に必要なバッテリーが内蔵されています。空荷時の重量に加え、このサービスロボットは、本体下部の積載プラットフォームに、重量30kgまでの荷物を運ぶことができます。両腕は、それぞれ3kgまで持ち上げることができます。この際、ロボットのベース部分についている車輪で効率よく移動できます。これにより、最小限の電力消費と走行の静粛性が確保される一方、想定される用途に対し十分な、時速最大4kmの移動性能を実現しています。
さまざまな用途のプログラム入力設定が可能なタッチスクリーンに加え、REEMには、マイク、ステレオカメラ、レーザー装置、超音波センサ、加速度センサ、ジャイロスコープが搭載されています。これらのデバイスにより、ロボットは室内における現在位置を判断し、急な障害物や動線を横切る人を避けながら、作業の対象範囲内を自律的に移動します。
首と腰の部分に内蔵された2つのDCマイクロドライブが、必要な非言語表現を実現しています。コンパクトなサイズのため、この様な狭いスペース内でもドライブは容易に稼働できます。小型アクチュエータは頭部や胴体部をそれぞれ独立して動かしたり、さまざまな姿勢をとれるようにします。このようにして、それぞれの特定の状況に適したボディランゲージを通じて、人間の特性を再現することができます。

マイクロドライブによる柔軟性
マイクロドライブは、単なる大型モータの代用品ではありません。その物理的特性により、小型化した結果として考えられる以上に、大型モータに比べ、より優れたダイナミクス、高出力、高効率性を実現します。これは実際、耐用寿命に影響を及ぼすことなく、短時間の過負荷に耐えることを意味します。さほど頻繁には生じないものの、これは特定のジェスチャーを模倣するのに必要となる、一時的な動作の実行に特に有効です。これらは、すべてのマイクロモータにおける一般的な機能ですが、特定のモデルでは、用途に応じてより多彩な機能が装備されています。ステッピングモータでは、制御パルスあたりの設定ステップ幅により、追加のエンコーダなしで高精度の位置決めが可能です。ブラシレスドライブは、最小限の電源供給で一定した駆動を保てることから、電圧低下時でも即時にシステム障害の発生しない、バッテリーバックアップされた自律型システムに適しています。電子整流式のDCモータは、長期寿命と最大のダイナミクスという点において最適なオプションです。インテリジェントモーションコントローラは、四象限動作での駆動を制御できることから、ロボットコントローラへの負荷を軽減します。すべての小型ドライブは、異なるギアモータの組み合わせにより、特定の用途に合わせた速度や出力トルクを設定できます。事実、人型ロボットの分野のみならず、マイクロモータは、モータ駆動の腕や義足への導入など、最も厳格な要件を満たしており、ロボティクス化支援の分野において長年活用されてきました。
最新マイクロドライブの用途は多岐にわたり、そのデザインも目的に応じてさまざまです。しかしながら、現段階では、どんな状況でも万能という訳ではありません。そこで、システムコンセプトが、重要な意味合いを持ってきます。モーションコントローラ等の制御モジュールをはじめ、エンコーダ、バスコネクション、各種ギアヘッド、そして(最も重要な)各条件に柔軟に適合できる電子制御ユニットなど、多様なアクセサリのおかげで、マイクロドライブは、ロボット製造における理想的な機械の「筋肉」としての役割を果たしています。